

بیایید یک ربات متعادل کننده معکوس ساده بسازیم و با آن کار کنیم . اگر آردوینو و مقداری مواد دارید فقط به نیم روز
برای انجام آنها نیاز دارید .
[ویدئویی از رباتی که میسازید]
مقدمه:
پس از چند کار با آردوینو، به فکر ساختن یک آونگ معکوس افتادم. سپس من دو سیاست برای پروژه داشتم.
- تا حد امکان ساده
- بوت استرپ (بدون مراجعه به وب سایت)
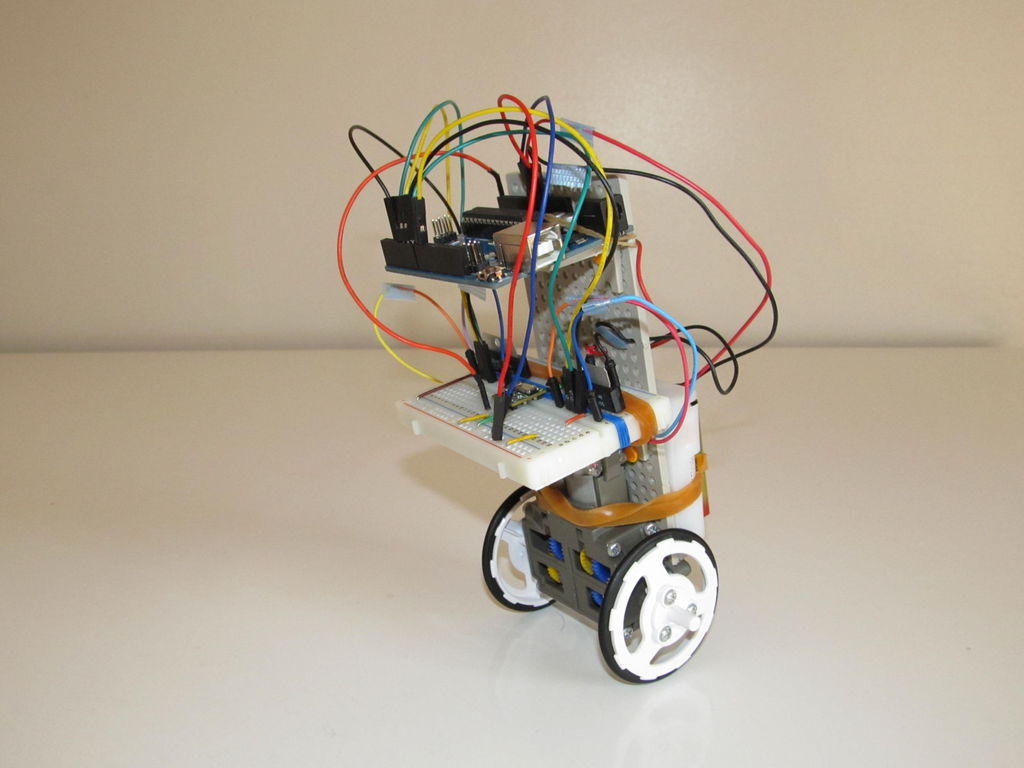
اگرچه آنها نگه داشته شده اند (*1)، بیش از یک هفته تمام طول می کشد تا ربات من به تعادل برسد. بنابراین به نظر می رسد سادگی ربات من در بدنه، مدار و برنامه آن (به نام "طرح") حفظ می شود. این فقط یک ماژول ژیروسکوپ آنالوگ (با قیمت 4 دلار (*2))، دو موتور هواپیما (با قیمت 1.5 دلار) و دو آی سی آنالوگ (با قیمت 1.5 دلار) برای راه اندازی این موتورها دارد.
(*1) من وب سایت ها را برای دو موضوع ارجاع داده ام. فرمولی برای آونگ معکوس و عیب یابی ماژول ژیروسکوپی که استفاده کردم.
(*2) 100 ین = 1 دلار من به عنوان نرخ مبادله استفاده می کنم.
تخته نان بدون لحیم کاری در تصویر بالا سادگی خود را نشان می دهد. و ویدیوی زیر نشان می دهد که به اندازه کافی خوب کار می کند.
کسی که یک LED چشمک زن با آردوینو ساخته است، می تواند ربات معکوس خود را در نیم روز یا کمتر طبق دستور من در زیر مونتاژ کند. اما من فکر می کنم شبیه به حل یک پازل است تا آن را روی چرخ هایش متعادل کنیم. بنابراین من یک راه حل را در سه مرحله نشان می دهم تا یک پازل خراب نشود. ای کاش فیلم ها و تصاویر می توانستند انگلیسی ضعیف من را پوشش دهند.
* نسخه ژاپنی این آموزش نیز موجود است.
** اطلاعات اضافی، 20 اوت 2014:
یک برنامه جایگزین ساده تر، نسخه 2.0، در مرحله 5 موجود است.
مرحله 1: جمع آوری مواد
بدنه (با استفاده از سری ساخت و ساز آموزشی TAMIYA )
- یک ست بشقاب جهانی (2 عدد)
- یک ست بازوی جهانی
- یک جعبه دنده دوبل (چپ/راست مستقل 4 سرعته، شامل دو موتور DC)
- یک مجموعه تایر باریک (36 میلی متر، قطر 55 میلی متر.)
برق
- یک آردوینو UNO
- تخته نان کوچک بدون لحیم کاری
- چند سیم جامپر
- دو آی سی درایور موتور ( TOSHIBA TA7291P )
- یک ژیروسکوپ ( Akizuki-denshi K-04912 : سنسور ENC-03R در این ماژول)
- چهار باتری AA
- نگهدارنده باتری 4AA
- باتری 9 ولت (PP3)
- دو ضربه باتری
- چند باند لاستیکی
[آموزش مرحله 1]
[تفسیر 1]
من احساس کردم که ماژول ژیروسکوپ آنالوگ ذکر شده در بالا تفاوت های فردی دارد. بنابراین فکر می کنم بهتر است دو یا سه ماژول را با هم خریداری کنید. و همانطور که در مرحله 11 نشان داده شده است ، یک ماژول اضافی می تواند ربات را پایدارتر کند.
