

من یک ربات خط فالوور ساختم که میتوان از آن به طرق مختلف استفاده کرد و پروژه خود را در چند مرحله خلاصه کردم.
برای شروع، تنها چیزی که نیاز دارید قطعات زیر است:
مرحله 1: قاب ربات
لیست قطعات:
-قاب ربات
-دو چرخ
-دو موتور DC
چگونه:
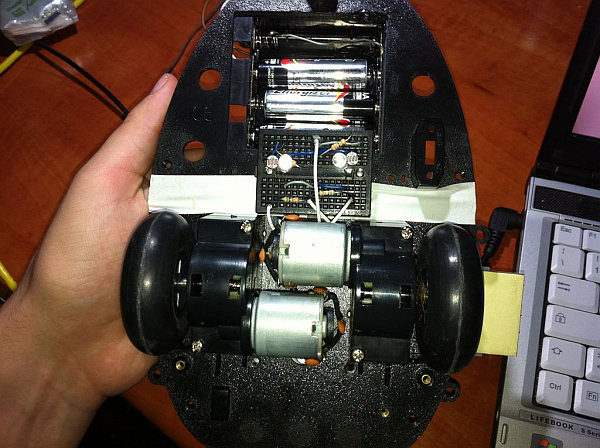
من از یک قاب ربات قدیمی با دو چرخ که توسط دو موتور DC فرمان میدهند، استفاده کردم، اما میتوانید از یک راهحل معادل نیز استفاده کنید.
مرحله 2: سنسور ir + مقاومت نوری
لیست قطعات:
- برد برد کوچک
- دو led
- دو مقاومت نوری
- دو مقاومت 56k
- دو مقاومت 330
- مقداری سیم
نحوه انجام:
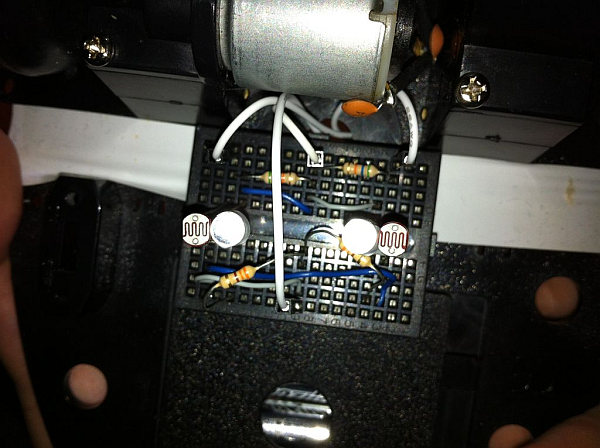
فاصله بین دو جفت led و مقاومت نوری را بر اساس عرض نوار خود محاسبه کنید.
مقاومت نوری و led ها را همانطور که در تصاویر مشاهده می کنید قرار دهید.
led ها را به دو مقاومت 330 اهم وصل کنید و دور آن نوار غیر شفاف قرار دهید تا از تداخل با مقاومت های نوری جلوگیری شود
تخته نان مینی را در قسمت پایین قاب قرار دهید.
مرحله 3: کنترل کننده موتور
لیست قطعات:
-برخی سیم
-دیودها (اگر قبلاً در کنترل کننده موتور گنجانده نشده باشد)
-کنترل کننده موتور
-نان برد بزرگ
-سه باتری 1.5 ولتی
مونتاژ سنسورها :
پایه های ورودی پل A را روی پایه های 11 و 12 آردوینو وصل کنید.
پایه های ورودی Bridge B را روی پایه های 6 و 5 آردوینو وصل کنید.
در صورت نیاز، پین های خروجی هر پل را با چند دیود به موتورها وصل کنید.
ولتاژ منبع تغذیه منطقی (Vss) را به 5 ولت آردوینو وصل کنید و زمین کنترل کننده موتور را به gnd آردوینو وصل کنید.
ولتاژ تغذیه (Vs) را به 3 باتری AA وصل کنید.
- دو چرخ
- دو موتور DC
- تخته کوچک نان برد
- دو LED
- دو مقاومت نوری
- دو مقاومت 56k -
دو مقاومت 330 -
مقداری سیم
- دیودها (اگر قبلاً در آن گنجانده نشده است کنترلر موتور)
-کنترل کننده موتور (من از L298 استفاده کردم)
- برد بزرگ
- سه باتری 1.5 ولت
- آردوینو UNO
برای جزئیات بیشتر: [Arduino] Linefollower با مقاومت نوری
