


از زمانی که Boston Dynamics ربات چهارپا - Spot را منتشر کرد، ساخت سگ ربات بسیار محبوب شده است. چندین تلاش برای ساخت ربات مشابه وجود دارد. بیشتر آنها گران هستند و پیگیری و ساختن آنها بسیار دشوار است. این دستورالعمل سعی دارد نسخه DIY را با پرینت سه بعدی با استفاده از سخت افزار و قطعات الکترونیکی بسیار ارزان ارائه دهد. ساخت آسان این ربات برای همه مقرون به صرفه باشد، ویدیوهای مونتاژ را در مرحله 6 تا 8 تماشا کنید. این ربات با استفاده از گوشی هوشمند کنترل و بازی می شود، برای دانلود برنامه به بخش نرم افزار مراجعه کنید.
مرحله 1: چاپ مدل های سه بعدی
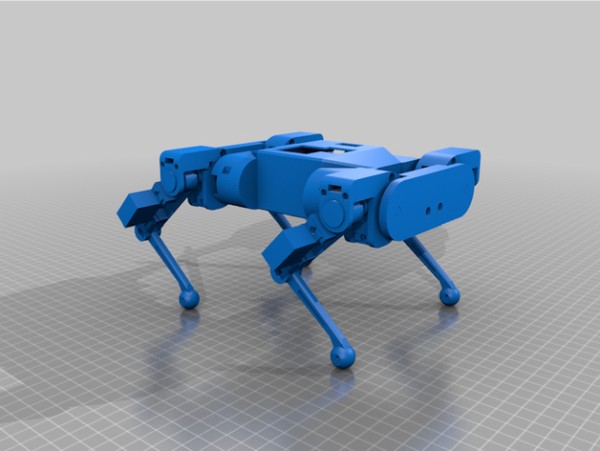
می توانید مدل های چاپ سه بعدی STL را از اینجا دانلود کنید . ربات ساخته شده که در اینجا نشان داده شده است در PLA چاپ شده است. پارامترهای پیشنهادی برای برش مدل ها برای چاپ به شرح زیر است. میتوانید آنها را متناسب با چاپگر سه بعدی که استفاده میکنید تنظیم کنید.
- ضخامت پایین/بالا: 1 میلی متر
- ضخامت پوسته: 1.2 میلی متر
- ارتفاع لایه: 0.2 میلی متر
- تراکم پر کردن: 10%
- پشتیبانی: بله
- نوع چسبندگی: دامن یا لبه
مرحله 2: قطعات سخت افزاری/الکترونیکی
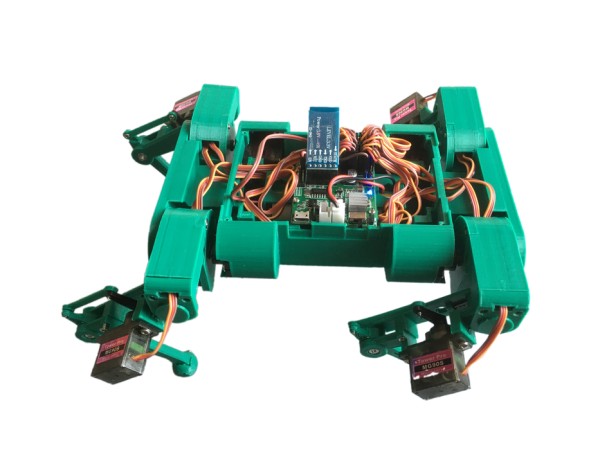
برای ساخت این ربات به قطعات سخت افزاری و الکترونیکی زیر نیاز دارید:
- یک برد HuaDuino، آردوینو نانو با ویژگی های پیشرفته سازگار است. همه چیز را روی یک PCB ادغام می کند. ساخت ربات با آن برای مردم بسیار آسان تر است. مدار شارژ باتری تعبیه شده، شارژ باتری راحت تر است. می توان آن را در آمازون پیدا کرد . توضیحات کامل محصول را اینجا ببینید ، اکیداً توصیه می کنیم آن را بخوانید. در استفاده از آن از دردسر شما جلوگیری می کند.
- یک باتری لیتیوم یونی 3.7 ولت 18650 با کانکتور XH2.54.
- 12 x Tower Pro MG90 یا سرووهای کلون سازگار.
- یک زنگ 5 ولت
- یک ماژول بلوتوث، برای جزئیات بیشتر به زیر مراجعه کنید
- یک سیم دو نقطه زن و ماده یا هر چیزی که برای اتصال دو پین می توانید بفهمید
- چند پیچ m2x6، m2x10
- تعدادی پیچ سر تخت M3x6، M3x14، M3x20 و مهره M3
ماژول بلوتوث
- یک ماژول HC-06، HC-05 و SPP-CA کلاسیک بلوتوث 4.0 SPP، اگر از این نوع ماژول بلوتوث استفاده می کنید. برای کنترل باید از برنامه Android virtual-gamepad-SPP استفاده کنید. نرخ باد باید روی 115200 تنظیم شود. برای پیکربندی نرخ باود با استفاده از دستورات AT این آموزش را ببینید.
- یا یک ماژول بلوتوث LE BT-05 CC2540 . بسیاری از ماژول های BLE با نام های متفاوتی وجود دارد، اما آنها با تراشه CC254x ساخته شده اند. نمونه هایی مانند HM-10 و CC41-A نمونه هایی هستند که می توانید در بازار پیدا کنید. از آنجایی که سیستم عامل متفاوت است، مجموعه دستورات AT نیز ممکن است متفاوت باشد. می توانید از این کد برای شناسایی آنها استفاده کنید. برای کار با کد ربات و برنامه ها، نرخ باود باید روی 115200 تنظیم شود. سرویس UUID باید با استفاده از دستورات AT روی 0xDFB0 و UUID مشخصه باید روی 0xDFB1 تنظیم شود. در زیر کدی وجود دارد که برای انجام خودکار این کار در نظر گرفته شده است، اما در صورت استفاده از این کد ممکن است کار نکند.
برنامه آردوینو مستقل زیر دستورات AT را صادر می کند که سرویس ماژول BT-05 BLE UUID، UUID مشخصه و نرخ باد را تنظیم می کند، با فرض اینکه نرخ باود پیش فرض BLE 9600 باشد.
void setup() {
Serial.begin(9600); //change to fit your ble initial baud_rate, usually is 9600
Serial.println("AT+UUID0xDFB0\r"); // set service UUID
delay(50);
Serial.println("AT+CHAR0xDFB1\r"); // set characteristic UUID
delay(50);
Serial.println("AT+BAUD8\r"); // set baud rate to 115200
}
void loop() {}
مرحله 3: نرم افزار - آپلود سیستم عامل ربات
سیستم عامل ربات –
این بسته فشرده را دانلود کنید و سیستم عامل آن را مطابق ویدئو در HuaDuino آپلود کنید. کد منبع در github است ، شاخه Lassie را بررسی کنید و به پوشه source_arduino نگاه کنید.
کنترل برنامه ها –
- برنامه goBLE iOS در فروشگاه اپل؛ برای ماژول بلوتوث LE
- برنامه اندروید virtual-Gamepad-BLE برای ماژول بلوتوث LE. سازگار با اندروید 5.0 و آخرین.
- برنامه اندروید virtual-gamepad-SPP برای ماژول بلوتوث کلاسیک 4.0 SPP HC-06، HC-05 و SPP-CA. سازگار با اندروید 4.0 و بالاتر
مرحله 4: سیم کشی
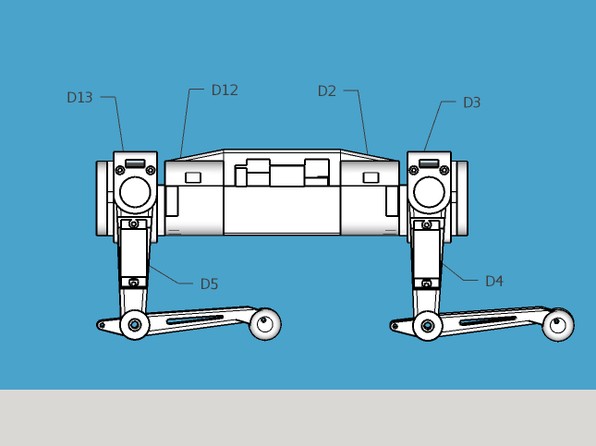
- پس از آپلود سیستم عامل در HuaDuino، با اتصال یک سیم دوپوینت بین پایه A6 و 5 ولت و اتصال سرووها به پین ها (به زیر مراجعه کنید) همه سرووها را روی زاویه پیش فرض قرار می دهد که ربات در وضعیتی مانند شکل ها قرار می گیرد. زاویه پیشفرض زاویه مرجع برای انجام صحیح حرکت هر حرکت است.
- پس از مونتاژ ربات، سیم دو نقطه را بردارید، ربات به عنوان انگشت سوم خواهد ایستاد. اگر نه، باید سروو را دوباره تنظیم کنید.
پین سروو –
