

عملکرد این ربات بسیار ساده است.
سنسورهای مادون قرمز که در جلوی شاسی قرار میگیرند، زمانی که ربات ما روی یک خط سیاه یا زمانی که روی یک پسزمینه سفید قرار دارد، نظارت میکنند.
در این پروژه از شاسی گرد مناسب ربات استفاده خواهیم کرد.
در صورت قرار گرفتن ربات در خط مشکی، همیشه جلو می رود و در صورت خارج شدن از خط و افتادن در ناحیه سفید، تعیین می کند که آیا به سمت چپ یا راست تصحیح شود و در نتیجه روی خط سیاه باقی بماند. .
سنسورهایی که مورد استفاده قرار خواهند گرفت سنسور آرایه مادون قرمز Pololu (که سنسورهای بازتابی نیز نامیده می شود) QTRx8RC است که از هشت سنسور (فقط پنج سنسور استفاده می شود) QRE1113GR تشکیل شده است.
این آرایه دارای خروجی دیجیتال است و به راحتی می توان با استفاده از کتابخانه مناسب Pololu، برای تعیین موقعیت خط نسبت به سنسورها مدیریت کرد.
این آرایه از سنسورها را می توان در یک آرایه با 6 سنسور و دیگری با 2 سنسور شکست.
برای اطلاعات بیشتر در مورد آرایه حسگرها، به آدرس زیر مراجعه کنید:
http://www.pololu.com/catalog/product/961
در این پروژه اول، ما از یک کنترل خام برای ربات خود استفاده خواهیم کرد، یعنی نگران این هستیم که ربات را دنبال خط نگه داریم… ربات
در یک مسیر اجرا می شود و ما توجه می کنیم که حرکات ربات تا حدودی "رباتیک" خواهد بود. ، یعنی: نه خیلی صاف، اما تند.
برای پروژه های بیشتر به http://arduinobymyself.blogspot.com.br مراجعه کنید
مرحله 1: مسیر
مسیر از یک تکه مقوای سفید و نوار الکتریکی سیاه ساخته خواهد شد.
خم باید به حداقل قطر 6 اینچ یا بیشتر باشد.
در زیر دو نمونه از آهنگ داریم
مرحله 3: پروژه شاسی
شاسی با یک قطعه اکریلیک 3 میلی متری در قالب گرد با شکاف هایی برای چرخ ها ساخته شده است.
اسکرین شات های زیر را ببینید (متاسفم اما به زبان پرتغالی است) اما می توانید یک ایده کلی داشته باشید.
مرحله 4: نمودار شماتیک
بریم سراغ پینوت ها:
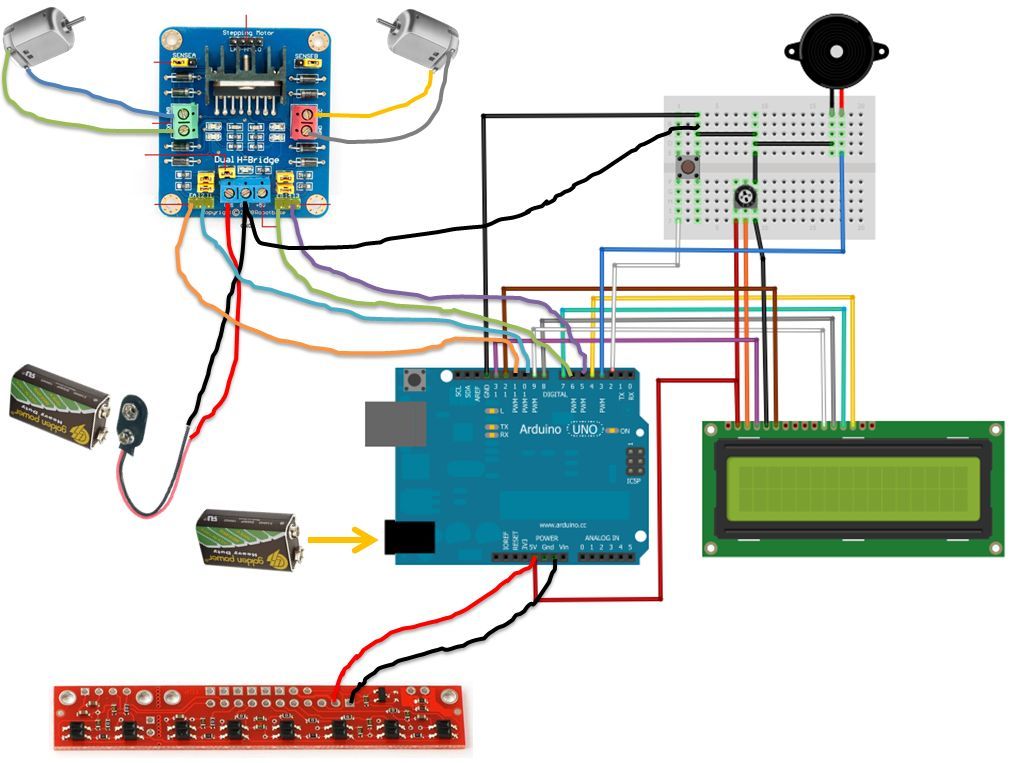
1 – موتورها به پین های خروجی پل H متصل می شوند (به قطبیت دقت کنید).
2 – باتری 9 ولت به VCC (+) و GND (-) H-Bridge متصل است.
3 – پین های in1، in2، in3 و in4 H-bridge به ترتیب به پایه های 10، 11، 5 و 6 به آردوینو متصل می شوند.
4- پایه های 1، 2، 3، 4 و 5 سنسور QTR، به پایه های A0، A1، A2، A3 و A4 متصل می شوند (توجه داشته باشید که سنسور 1 باید بیشترین سمت چپ را داشته باشد).
5 - LCD همانطور که در نمودار نشان داده شده است متصل می شود: پین های R / W - 13، Enable - 12، داده ها - 9، 8، 7 و 4 (بسته به نوع نمایشگر شماست).
1 x محافظ نمونه اولیه (اختیاری) (به شدت توصیه می شود)
1 x دوتایی H-BRIDGE
2 x جعبه دنده با 30:1 از انتقال نسبت و موتور DC مرتبط
2 x چرخ 3 اینچ
2 x 9 ولت باتری 400 میلی آمپر / ساعت
2 x 9 ولت گیره باتری
1 x توپ کاستور (چرخ سوم)
سیم و کابل برای اتصالات
پیچ، مهره، واشر، فاصله دهنده برای نصب
2 x قطعات اکریلیک برای برش ابزار شاسی
به طور کلی
برای جزئیات بیشتر: LINUSBot – ربات دنبال کننده خط با استفاده از آردوینو
