

Polydexter پروژه مقدماتی در استودیوی معماری گزینه های پیشرفته Creative Architecture Machines (CAM) در کالج هنر کالیفرنیا (CCA) بود که توسط جیسون کلی جانسون (هم بنیانگذار آزمایشگاه شهرهای آینده ) و مایکل شیلو تدریس شد . قطعات توسعهیافته برای این ربات در پروژه دوم استودیو، چاپگر سهبعدی ما Geoweaver ، که در اینجا در Instructables نیز یافت میشود، یکپارچه خواهند شد . پروژههای دیگر استودیو و همچنین دستورالعملهای همراه آنها را میتوانید در کانال یوتیوب ما پیدا کنید .
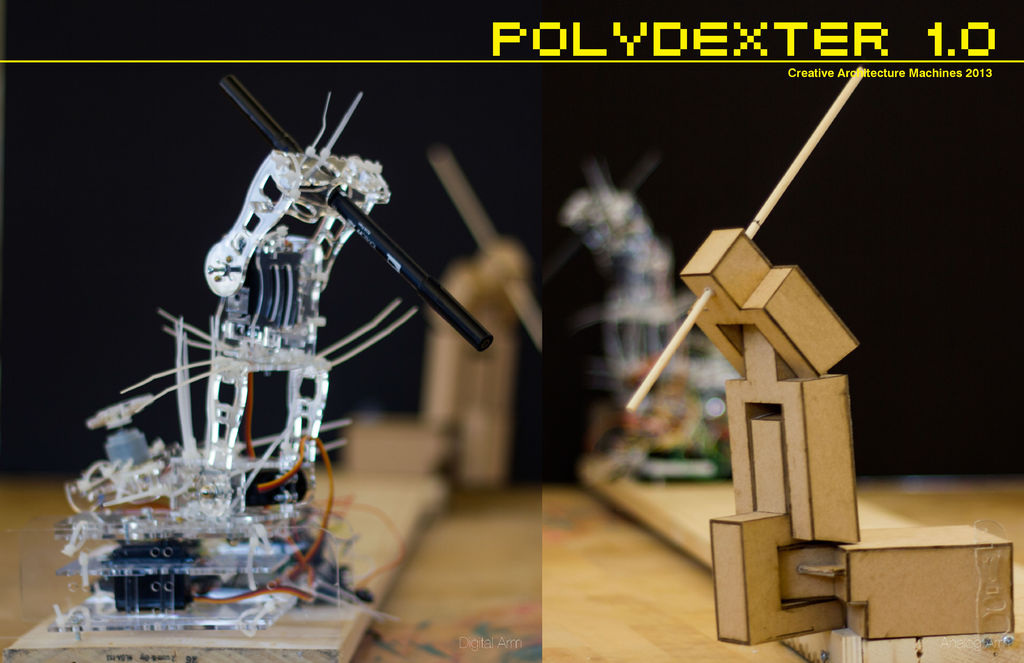
Polydexter، طراحی و ساخته شده توسط Jia Wu and I، یک بازوی ترجمه رباتیک با کنترل آردوینو از راه دور است. با استفاده از سه محور کنترل، حرکات ثبت شده توسط بازوی ورودی (آنالوگ) توسط بازوی خروجی (دیجیتال) افزایش مییابد و یک نقاشی ایجاد میکند. ما حس کنترل از راه دور را با پنهان کردن تمام قطعات الکترونیکی بازوی ورودی تقویت کردیم و آن را در تخته نئوپان با چسب پیچیدیم در حالی که تمام سیمکشیها را زیر یک قطعه الوار 2×6 اجرا کردیم. به سختی می توان دقیقاً فهمید که بازی با پلی دکستر چقدر سرگرم کننده است. به طور مناسب، ربات از ما انسانها میخواست که نحوه نوشتن را دوباره یاد بگیریم تا ترجمههای آن به درستی انجام شود (اگرچه جیا در آن بسیار خوب بود و میتوانست پس از تمرین کافی حروف چینی بنویسد!).
وقتی این پروژه را شروع کردیم، هیچ دانشی از آردوینو یا روباتیک نداشتیم و این مقدمه ای عالی برای کدنویسی ساده، سیم کشی الکترونیک و هنر طراحی مکانیکی بود. این یک اسباب بازی ساده اما اعتیادآور برای بازی است و مقدمه ای عالی برای ساخت ربات است. ما هنوز با آن سرگرم می شویم و مشتاقانه منتظر هستیم تا آن را به Firefly متصل کنیم تا ببینیم چگونه وارد کردن بینایی ماشین یا مجموعه داده های مختلف می تواند بر نقاشی ها تأثیر بگذارد. ما بسیاری از کاربردهای احتمالی آینده را برون یابی کردیم: آموزش نوشتن به زبانهای مختلف، ترجمه/ویرایش/سانسور پیامهای نوشتاری بین کشورها، یا بزرگتر کردن، ترجمه ضربهای از دست شما به فضای ساخته شده با استفاده از چیدمان دقیق آجر یا اکستروژن مواد.
ویرایش برای Epilog Challenge: اگر به یک برش لیزری شخصی دسترسی داشتیم، نمونه اولیه begeezus را از این روبات میسازیم . ما برنامههای زیادی برای بهروزرسانیها و بهینهسازیهای جدید داریم که میتواند قطعات بسیار ظریفتر و حکاکیشده لیزری از اکریلیک و احتمالاً Yupo را در خود جای دهد.
به هر حال، بیایید Instructablesing را دریافت کنیم.
مرحله 1: مواد و تجهیزات
مواد برش خورده:
- اکریلیک 1/8 اینچ، ~ 110 اینچ مربع
- نئوپان 1/16 اینچی، ~ 300 اینچ مربع
- الوار 2×6، ~3′-0 اینچ طول
- زیپ بند، ~30
- پیچ برای اتصال سروو به اکریلیک
الکترونیک:
- 3 پتانسیومتر
- 3 موتور سروو
- آردوینو اونو
- برد برد (یا تخته نمونه سازی)
- سیم جامپر
تجهیزات:
- آهن لحیم کاری
- پیچ گوشتی ها
- سیم کش
برای لیستی از وسایل الکترونیکی استفاده شده، لطفاً به این کیت های CAM سفارشی از Oddwires مراجعه کنید .
