

در طول سال ها، من چندین ربات بزرگ با استفاده از یک درایور رباتیک سفارشی ساخته ام که سیستم SmartRover نام دارد. این درایور در ابتدا برای ربات اسمارت روور من که من ساختم استفاده می شد که در اوج جریان 60 آمپر در 24 ولت کار می کرد. بدیهی است که SmartRover می تواند برای بسیاری از مبتدیان بیش از حد باشد. با هدف به اشتراک گذاشتن اصول رباتیک با باشگاه خود و با توجه به اینکه بسیاری از اعضا علاقه مند به کسب مهارت های عملی با روبات ها هستند، تصمیم گرفتم یک ربات DIY در مقیاس کوچکتر طراحی کنم. این در نهایت به عنوان SparkRover شناخته شد، یک کیت رباتیک مقرون به صرفه که من به طور انحصاری آن را به اشتراک گذاری با باشگاه Purdue Mechatronics اختصاص دادم.
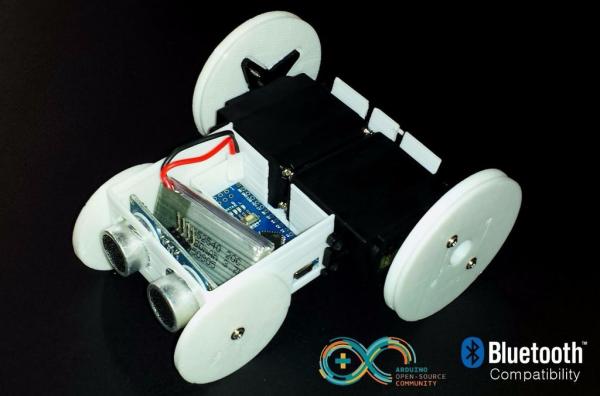
SparkRover یک کیت رباتیک چاپ سه بعدی منبع باز است که می تواند توسط تلفن هوشمند کنترل شود و از دیوارها جلوگیری کند. این ربات را می توان از طریق بلوتوث کنترل کرد و می تواند راهی عالی برای مبتدیان برای آشنایی با محیط آردوینو، ارتباطات سریال، عملکرد سروو موتورها و حسگرهای اولتراسونیک باشد. این ربات قابل شارژ و برنامه ریزی است که برای اهداف آموزشی عالی است.
SparkRover را می توان برای برنامه هایی از جمله اما نه محدود به موارد زیر استفاده کرد:
- پلتفرم آموزش رباتیک
- دوربین اتوماتیک گوپرو دالی
- دستیار دوربین پانوراما
- ربات حل پیچ و خم
- مسابقه ربات
سلب مسئولیت: دانش عمومی و درک ایمنی از ابزارهای برقی و سایر تجهیزات مورد استفاده باید هنگام استفاده از چنین مواردی که ممکن است باعث جراحت یا مرگ شود اعمال شود. این پروژه "همانطور که هست" برای اهداف آموزشی ارائه شده است. نویسنده هیچ مسئولیتی در قبال حادثه یا خسارت ناشی از این پروژه ندارد.
مرحله 1: قطعات، ابزارها و فایل ها

اگر اهل سرگرمی هستید، می توانید بیشتر این قطعات را در جعبه ابزار یا کارگاه خود بیابید. در غیر این صورت، یک سفر سریع به فروشگاه سخت افزار بیشتر قطعات را برای شما به ارمغان می آورد.
ما این پروژه را به عنوان یک کیت برای دانش آموزان در باشگاه پوردو مکاترونیک ارائه می دهیم. اگر میخواهید از توسعه ما حمایت کنید و زحمت یافتن قطعات را کاهش دهید، لطفاً با مراجعه به وبسایت ما، کیت SparkRover را برای خود سفارش دهید (که شامل تمام قطعات مونتاژ ربات است): کیت SparkRover را سفارش دهید.
برای مونتاژ SparkRover به این قطعات نیاز دارید:
- قطعات پرینت سه بعدی (1x - شاسی SparkRover، 1x - جلد برای شاسی، 2x - چرخ جلو، 2x - چرخ عقب)
- 2 عدد از حلقه های 55 میلی متری
- 2x بسته سروو Futaba S3003 (شامل سروو، سروو هورن، پیچ و غیره)
- ماژول بلوتوث HC05
- آردوینو نانو نسخه 3
- 26 سیم رشته ای AWG (یا سیم های جامپر)
- کلید ضامن دکمه فشاری
- باتری LiPo کوچک 3.7 ولت
- تراشه Step-Up 3.7 ولت تا 5 ولت
- سنسور اولتراسونیک
اگر سرووهای چرخش پیوسته دارید، لطفاً به جای استفاده از Futaba S3003 از آنها استفاده کنید.
اینها ابزارهایی هستند که برای کمک به شما در هنگام مونتاژ نیاز دارید:
- یک دستگاه لحیم کاری و لحیم کاری (اختیاری)
- دم باریک
- نیپرها
- قیچی
- سیم کش
- فیلیپس / پیچ گوشتی سر صاف
- کابل مینی یو اس بی
- تفنگ چسب داغ (یا نوار دو طرفه)
- نوار آبی
اینها منابعی هستند که ما در طول این دستورالعمل استفاده خواهیم کرد:
- قطعات پرینت سه بعدی (1x - شاسی SparkRover ، 1x - روکش برای شاسی ، 2x - چرخ جلو ، 2x - چرخ عقب )
- Servo Stabilize – کد آردوینو
- HC05 – دستورات Arduino AT
- SparkRover – کنترل بلوتوث آردوینو
- SparkRover – حالت پانوراما آردوینو
- SparkRover – Arduino Wall Avoider
- SparkRover – برنامه اندروید برای کنترل بلوتوث (در حال حاضر در دست توسعه)
مرحله 2: فایل های سه بعدی را چاپ کنید
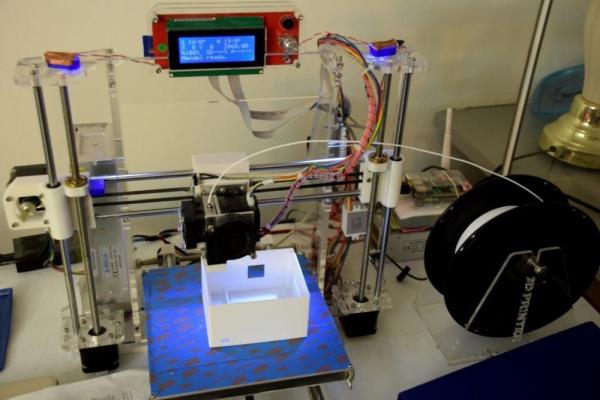
SparkRover از چهار قسمت پرینت سه بعدی (فایل STL برای هر کدام) تشکیل شده است. برای چاپ موارد زیر اقدام کنید:
- 1x - شاسی بلند SparkRover
- 1x - پوشش برای شاسی
- 2x - چرخ جلو
- 2x - چرخ عقب
شما می توانید این اشیاء را روی بستر چاپ MakerBot، Reprap و اکثر چاپگرهای سه بعدی بچینید. گاهی اوقات ممکن است مجبور شوید قطعات را جداگانه چاپ کنید. پر کردن را روی حداقل 20% تنظیم کنید و سعی کنید روی فیلامنت 1.75 میلی متری PLA با کیفیت استاندارد چاپ کنید. حتماً پشتیبانی ها را فعال کنید.
مرحله 3: آماده سازی چرخ ها

دو چرخ پشتی پرینت سه بعدی را بردارید و آنها را صاف روی یک میز قرار دهید. برای هر چرخ موارد زیر را انجام دهید:
