

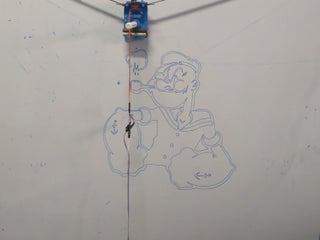
در این آموزش ساختن یک پلاتر XY/ ماشین رسم پلاتر عمودی با استفاده از آردوینو را یاد می گیریم. با این ماشین طراحی عمودی بسیار کارآمد، میتوانیم تصاویر را روی اندازههای مختلف کاغذ، دیوارها یا تختههای سفید به همراه چاپ متون، تولید هنر و گرافیتی بکشیم. تصاویر برداری (SVG) به عنوان ورودی به آنها داده می شود، برای چاپ فایل های jpeg و png، از یک مبدل استفاده کنید تا فایل را به فرمت فایل SVG تبدیل کنید. ما از آردوینو، شیلد l293d و چاپگر IC، سروو، سه بعدی به عنوان یک نیاز اساسی برای چاپ قطعات مورد نیاز استفاده خواهیم کرد. در کنار این سخت افزار از فایل MAKELANGELO jar نیز به عنوان نرم افزار دستورالعمل تغذیه استفاده خواهد شد. فیزیک نقش مهمی در عملکرد صحیح و کارآمد این پروژه دارد، بنابراین در تمام مدتی که روی این پروژه کار می کنیم باید مراقب عملکرد تنش و اصطکاک باشیم.
مرحله 1: قطعات مورد نیاز برای پلاتر:

- 1x Arduino UNO R3 (1)
- 1x محافظ موتور L293D (1)
- آی سی موتور درایو L293D (2)
- NEMA 17 Stepper Motors (2)
- سرو موتور MG90S (1)
- مجموعه 16 دندانی قرقره GT2 (2)
- کمربند لاستیکی GT2 (5M)
- منبع تغذیه 5 ولت - 2 آمپر (1)
- وزنه های خارجی (حدود 200 گرم در هر طرف)
- سیم های جامپر
- ماژیک وایتبرد.
- قطعات پرینت سه بعدی استفاده شده در زیر ذکر شده است.
مرحله 2: مدل های سه بعدی:
برنامه هایی که من استفاده کردم:
- Autodesk fusion 360 برای تهیه مدل سه بعدی فایل های مورد نیاز
- Ultimaker Cura 4.8.0 برای برش دادن فایل و تبدیل آن به فرمت فایل g-code.
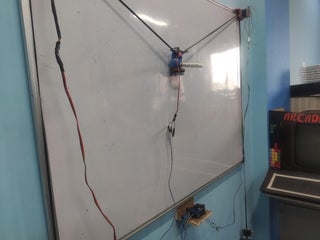
مرحله 3: مونتاژ سخت افزار:

- تسمه های لاستیکی را روی نشانگر مرکزی که قسمت چاپ شده سه بعدی را نگه می دارد وصل کنید. (طول کمربندها را با توجه به اندازه تخته سفید خود تنظیم کنید.)
- سروموتور خود را به نشانگر مرکزی که قسمت چاپ شده سه بعدی را نگه می دارد به گونه ای وصل کنید که سر آن به سمت بالا باشد. (برای سروو بلند کردن قلم، از یک خازن در سراسر VCC و GND (470uf یا بالاتر) استفاده کنید، از مشکلات سروو جلوگیری می کند
. - موتورهای پله ای نما 17 را روی براکت های نصبی که چاپ کرده اید جمع کنید.
- مطمئن شوید که وزن را در دو طرف موتورها وصل کنید تا کشش بین تسمههای متصل حفظ شود.
- فراموش نکنید که یک وزنه را به نشانگر مرکزی که قسمت چاپ شده سه بعدی را نگه می دارد وصل کنید تا نشانگر به طور موثر رسم شود.
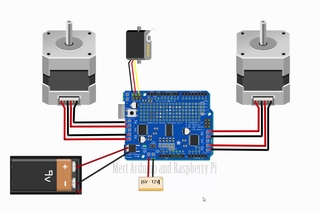
مرحله 4: اتصالات مدار:
ارتقاء درایور محافظ موتور برای موتورهای پله ای NEMA-17 با گشتاور بالا:
در لینک زیر با نحوه استفاده از موتور پله ای با گشتاور بالا (در این مورد از نما 17 با گشتاور 4.2 کیلوگرم بر سانتی متر استفاده می کنیم) با درایور موتور L293D آشنا می شوید. از آنجایی که استفاده از موتورهای پله ای با گشتاور بالا با درایور موتور، مشکلات گرمایشی زیادی ایجاد می کند، استفاده از دو آی سی روی هم باعث کاهش گرمای بیش از حد و کارآمدی پلاتر می شود. دلیل آن نیاز به جریان زیاد است. بنابراین، او محافظ راننده L293D Motor را برای حل این مشکل اصلاح کرد.

پس از نصب آی سی ها، تمام اتصالات را مطابق تصویر بالا انجام دهید.
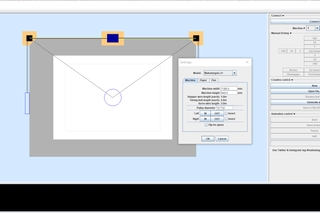
مرحله 5: کد منبع و MAKELANGELO:
- Arduino IDE را نصب کنید .
- فایل فشرده زیر را برای Makelangelo و کتابخانه های آن از هر یک از این دو لینک دانلود کنید:
لینک نرم افزار:
